



6-teljeline haridus- või liigendrobotikäsi, isetegemise delta või kaameraga robotvars
Spetsifikatsioon
Telg:6
Maksimaalne kandevõime: 4 kg
Korduv asukoht: ±0,01 mm
kasutusniiskus: 20-80%
salvei keskkond: 0℃-45 ℃
Paigaldamine: maapind
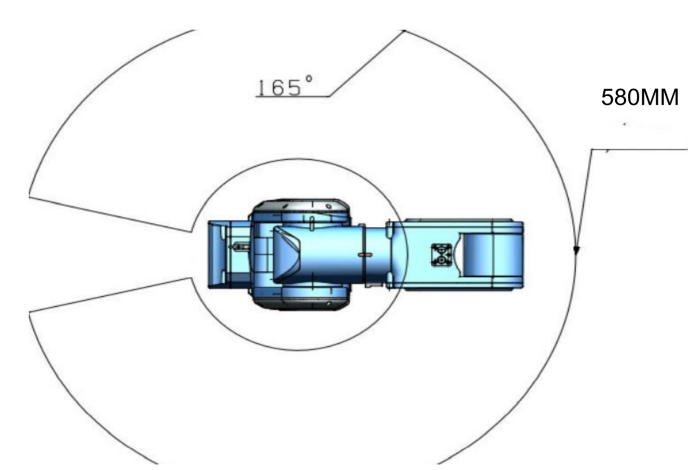
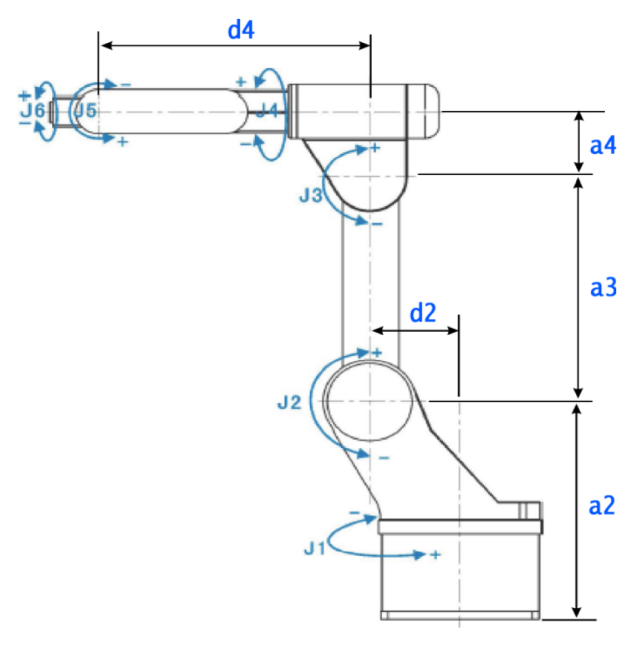
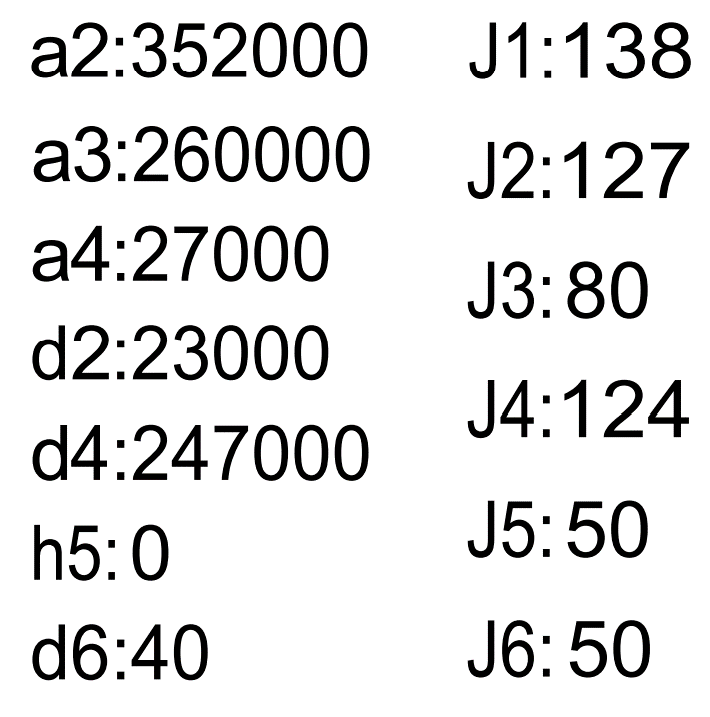
Tööpiirkond: J1:±165°
J2: -100°~+120°
J3: +150° ~ -60°
J4: ±175°
J5: +130° ~ -30°
J6: ±180°
Maksimaalne kiirus: J1:260°/s
J2: 250°/s
J3: 250°/s
J4: 250°/s
J5: 200°/s
J6: 760°/s
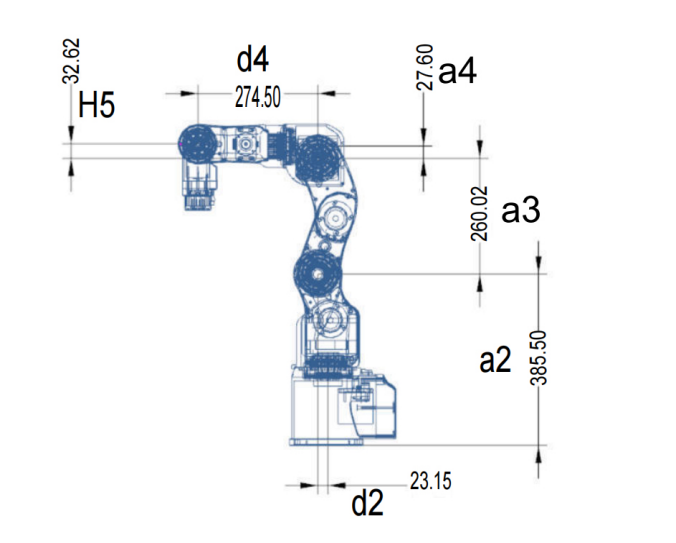
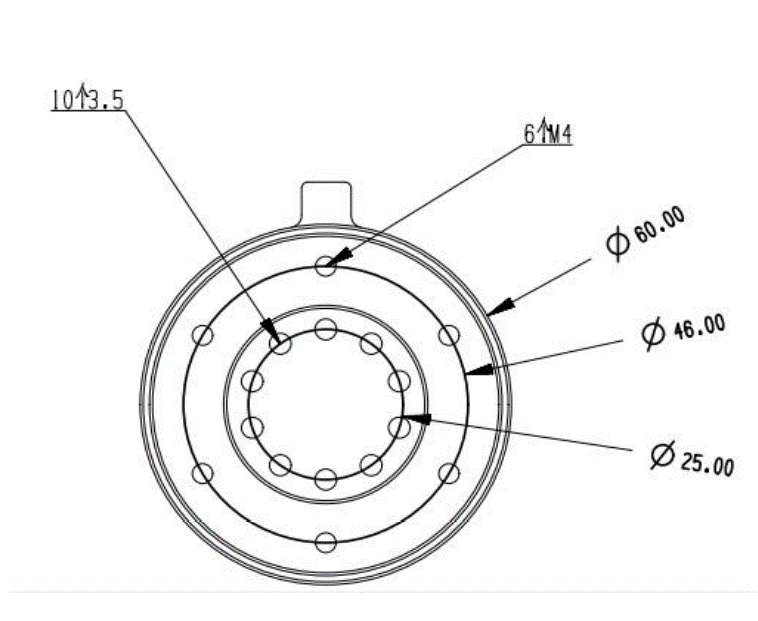
tööpiirkond:
aluse paigaldamine:
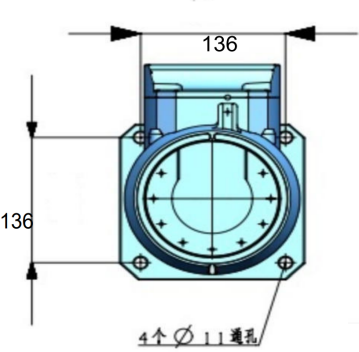
aluse paigaldamine:
Rakendused
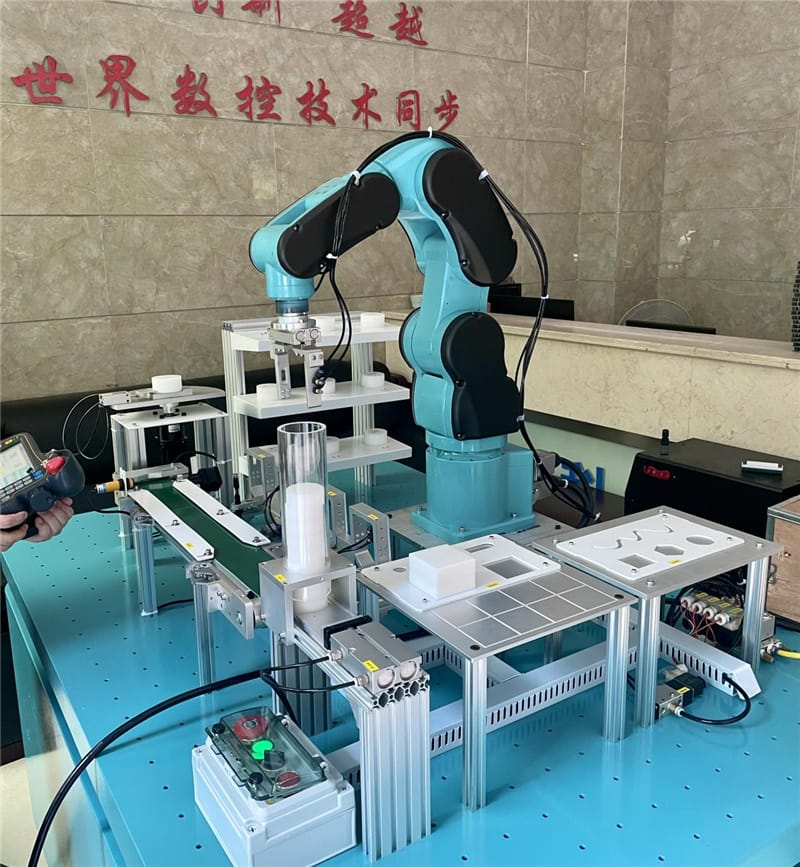
Haridusrakendused:
1. Uurida robotsüsteemi põhikoostist.
2. Tutvuda robotteachi ripatsi programmeerimise ja õpetamise funktsioonidega.
3. Õppida algteadmisi robotite offline programmeerimisest.
4. Uurida robot io toimimist ja rakenduste programmeerimist.
5. Uurida robotite visuaalseid rakendusi
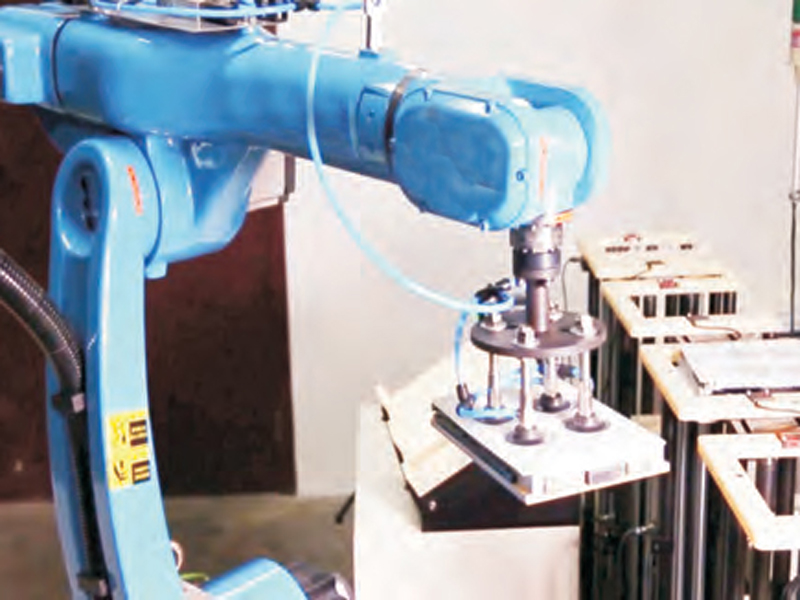
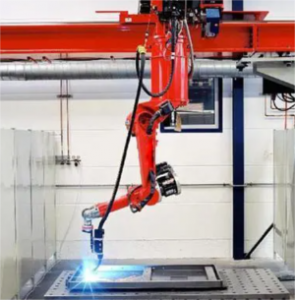
Kaubandusstseenid: Robotjäätis Robotbaarmen Robotikohv Robotipiimatee Kergetööstuse stseenid: Mõõtmine Doseerimine Kontrollimine Sorteerimine
Toote omadused
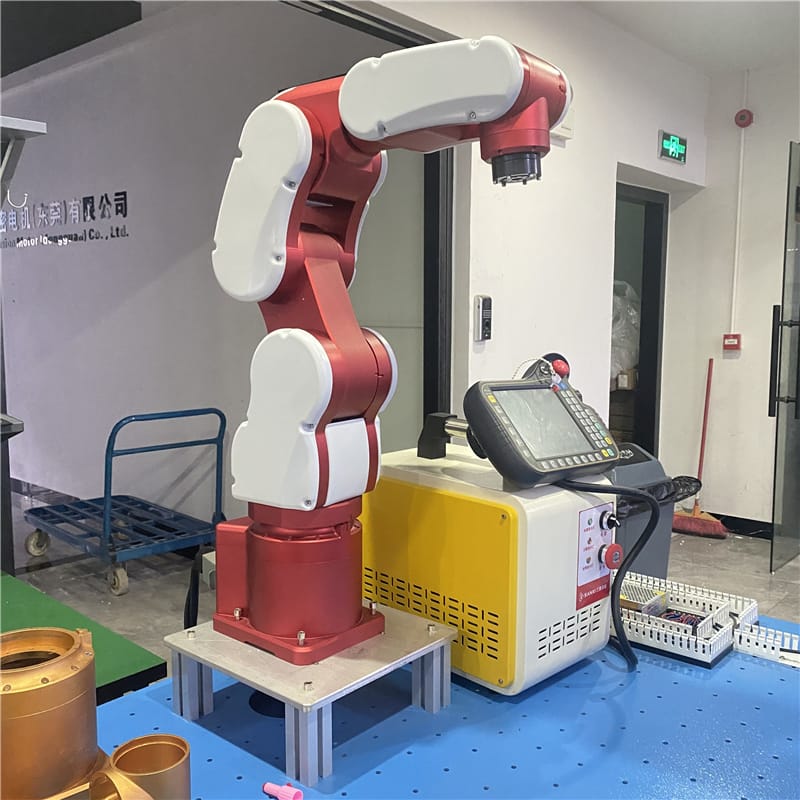
Robotkäsi: Robotkäsi on valmistatud alumiiniumist valanditest läbi CNC-töötluskeskuse ning pind on pihustatud plastikuga ja sellel on ilus välimus.
Reserveeritud kaabliauk: Roboti käel on reserveeritud kaabliaugud, mis on ilusad ega takista manipulaatori tööd. Hingetoru ots on reserveeritud pordi ja andmekaabli pistiku jaoks.
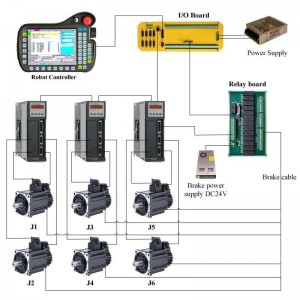
Juhtpaneel: suure ekraaniga LCD-ekraan, keele kuvamismeetod võib põhineda kliendi vajadustel, lihtne ja selge toimimine ja programmeerimine, parameetrite veebipõhise muutmise ja rikete enesediagnostika funktsioonidega.
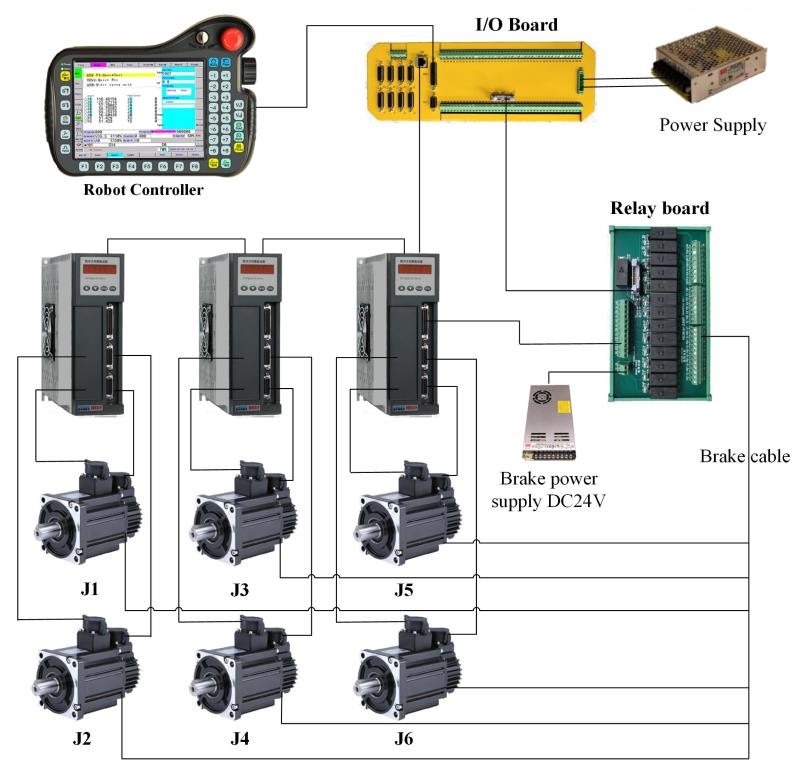
Roboti juhtkapp: intelligentne liikumisjuhtimissüsteem võtab kasutusele tööstusliku arvutitehnoloogia ja täielikult digitaalne servomoodul tagab roboti iga liigendi vahelduvvoolu servomootoritele ajami jõu.
Robotkinnitused: Tööriistakinnitus saab vastavalt kohandatud nõuetele valida erineva raskusastme ja koguse ning see on paigaldatud otsaäärikule, mida on lihtne reguleerida ja millel on lai kasutusala.